Organizers
- Prof. Tatsuo Arai, Osaka University, Japan (arai@sys.es.osaka-u.ac.jp)
- Prof. Toshio Fukuda, Meijo University, Japan (tofukuda@meijo-u.ac.jp)
- Prof. Fumihito Arai, Nagoya University, Japan (arai@mech.nagoya-u.ac.jp)
- Prof. Masayuki Yamato, Tokyo Women’s Medical University, Japan (myamato@abmes.twmu.ac.jp)
- Prof. Makoto Kaneko, Osaka University, Japan (mk@mech.eng.osaka-u.ac.jp)
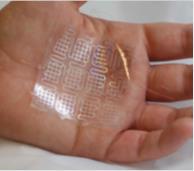
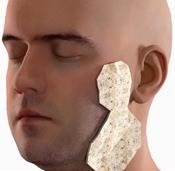
 Abstract. The main purpose of this workshop is to discuss a new and innovative methodology: Bio Assembler. This methodology is intended for creating 3D cellular systems such as functional tissue in vitro environments, in which active functional cells selected from a living organism are used to create the 3D cellular system. This new methodology will bring innovation to the next generation of tissue engineering and will become the world’s first creation of 3D cellular system in vitro environments. This innovation will be achieved by developing a methodology of hyper micro-nano measurement and control. The outcome of this innovation will bring great technological advancements to both engineering and life science field.
Abstract. The main purpose of this workshop is to discuss a new and innovative methodology: Bio Assembler. This methodology is intended for creating 3D cellular systems such as functional tissue in vitro environments, in which active functional cells selected from a living organism are used to create the 3D cellular system. This new methodology will bring innovation to the next generation of tissue engineering and will become the world’s first creation of 3D cellular system in vitro environments. This innovation will be achieved by developing a methodology of hyper micro-nano measurement and control. The outcome of this innovation will bring great technological advancements to both engineering and life science field.
The research consists of three areas: (1) Hyper measurement and separation of useful active cells, (2) Hyper assembling of 3D cellular system from selected active cells, and (3) Analysis and evaluation of 3D cellular systems. The technical development and theory in these fields will bring progress and systematization to biological science as well as micro-nano engineering science.
The workshop consists of invited talks relating to the 3D cellular system assembling and its characteristics measurement based on micro-nano robotics. And, some bioscience and medical researchers will be invited to present their latest research topics related to micro-nano robotics. It will discuss the topics in the deep wide aspects through this workshop.
List of Topics
- High speed cell and tissue characteristics measurement
- High speed cell and tissue separation
- High speed cell and tissue manipulation
- High speed cellular system assemble
- Analysis and evaluation of cellular system
- Prof. Tatsuo Arai, Osaka University, Japan
- Prof. Fumihito Arai, Nagoya University, Japan
- Prof. Toshio Fukuda, Meijo University, Japan
- Prof. Masayuki Yamato, Tokyo Women’s Medical University, Japan
- Prof. Makoto Kaneko, Osaka University, Japan
- Prof. Shoji Takeuchi, University of Tokyo, Japan
 Abstract. Cloud Robotics is an emerging field of robotics rooted in cloud computing, cloud storage, and other Internet technologies centered around the benefits of converged infrastructure and shared services. Driven by the rapid progress of wireless technology and availability of data centers, recent years have seen the rapid development of software frameworks and services that allow robots to leverage the powerful computational, storage, and communications infrastructure of modern data centers – the giant server farms behind the likes of Google, Facebook, and Amazon – for robotics tasks and robot learning. The same technological advances also beg for a new family of algorithms to process, plan, and learn from the immense amounts to data gathered by today’s robots.
Abstract. Cloud Robotics is an emerging field of robotics rooted in cloud computing, cloud storage, and other Internet technologies centered around the benefits of converged infrastructure and shared services. Driven by the rapid progress of wireless technology and availability of data centers, recent years have seen the rapid development of software frameworks and services that allow robots to leverage the powerful computational, storage, and communications infrastructure of modern data centers – the giant server farms behind the likes of Google, Facebook, and Amazon – for robotics tasks and robot learning. The same technological advances also beg for a new family of algorithms to process, plan, and learn from the immense amounts to data gathered by today’s robots.
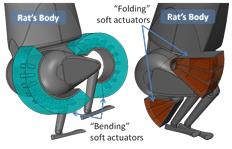
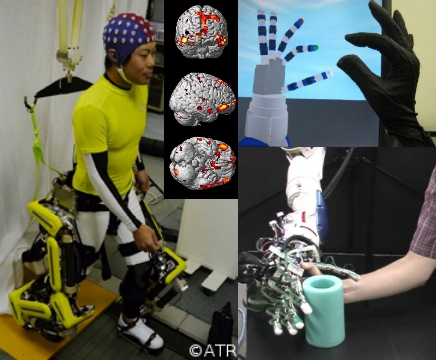 Abstract. We are experiencing fast paced developments in robotics and neural sciences. Robots are becoming more and more part of our daily lives; in the near future they will be with us as companions, caregivers, and smart prosthetics. The progress in neural sciences is accelerated by brain imaging, clever behavioral experimentation and technical advancements such as multi-electrode recordings and better neuroinformatics tools. Now the neuroscientific knowledge is more easily accessible and available for building robotic systems that can exhibit the robustness, adaptability and intelligence of humans. Reciprocally, significant developments in robotics and machine learning put robotics in the service of neuroscience as experimental platforms or test-beds of brain models. We are witnessing the growth of a solid interdisciplinary research frontier, which on one hand uses neuroscience for better robotics and intelligent systems, and on the other hand, uses robotics to better understand human cognition and intelligence. With this workshop, we aim to bring in the pioneers in this frontier for further fostering this interdisciplinary effort by facilitating the exchange of ideas among researchers from diverse fields
Abstract. We are experiencing fast paced developments in robotics and neural sciences. Robots are becoming more and more part of our daily lives; in the near future they will be with us as companions, caregivers, and smart prosthetics. The progress in neural sciences is accelerated by brain imaging, clever behavioral experimentation and technical advancements such as multi-electrode recordings and better neuroinformatics tools. Now the neuroscientific knowledge is more easily accessible and available for building robotic systems that can exhibit the robustness, adaptability and intelligence of humans. Reciprocally, significant developments in robotics and machine learning put robotics in the service of neuroscience as experimental platforms or test-beds of brain models. We are witnessing the growth of a solid interdisciplinary research frontier, which on one hand uses neuroscience for better robotics and intelligent systems, and on the other hand, uses robotics to better understand human cognition and intelligence. With this workshop, we aim to bring in the pioneers in this frontier for further fostering this interdisciplinary effort by facilitating the exchange of ideas among researchers from diverse fields
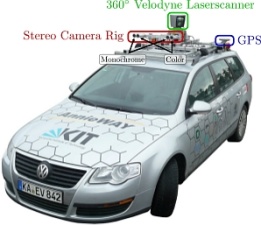 Abstract. The purpose of this workshop is to discuss topics related to the challenging problems of autonomous navigation and of driving assistance in open and dynamic environments. Technologies related to application fields such as unmanned outdoor vehicles or intelligent road vehicles will be considered from both the theoretical and technological point of views. Several research questions located on the cutting edge of the state of the art will be addressed. Among the many application areas that robotics is addressing, transportation of people and goods seem to be a domain that will dramatically benefit from intelligent automation. Fully automatic driving is emerging as the approach to dramatically improve efficiency while at the same time leading to the goal of zero fatalities. This workshop will address robotics technologies, which are at the very core of this major shift in the automobile paradigm. Technologies related to this area, such as autonomous outdoor vehicles, achievements, challenges and open questions would be presented.
Abstract. The purpose of this workshop is to discuss topics related to the challenging problems of autonomous navigation and of driving assistance in open and dynamic environments. Technologies related to application fields such as unmanned outdoor vehicles or intelligent road vehicles will be considered from both the theoretical and technological point of views. Several research questions located on the cutting edge of the state of the art will be addressed. Among the many application areas that robotics is addressing, transportation of people and goods seem to be a domain that will dramatically benefit from intelligent automation. Fully automatic driving is emerging as the approach to dramatically improve efficiency while at the same time leading to the goal of zero fatalities. This workshop will address robotics technologies, which are at the very core of this major shift in the automobile paradigm. Technologies related to this area, such as autonomous outdoor vehicles, achievements, challenges and open questions would be presented.
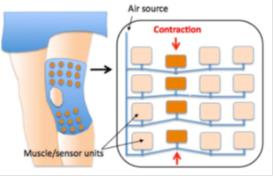
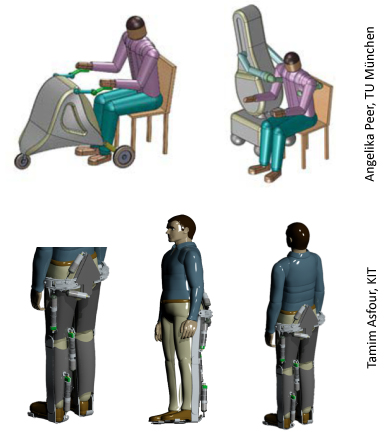 Abstract. Physical assistive devices such as mobility aids, exoskeletons or orthoses form an important field of robotics and have received a growing attention over the past years. The design and control of such systems is a challenging task since physical assistive devices stay in close contact with humans and have to adapt their behavior to the current user state and user needs. This requires fundamental understanding of human motor control and coordination mechanisms under normal and pathological conditions as well as online observation and identification of the current user state and intention to reliably adjust the assistive device behavior and to provide appropriate support. Model-based simulation and optimization can be very powerful tools in this context and will be the main topic of this workshop. We will focus on computational tools and the underlying mathematical methods as well as modeling approaches with the main aim of giving an overview of the state of the art in this field and of highlighting future directions. The workshop particularly aims at joining experts for different physical assistive devices, i.e. mobility aids, exoskeletons and orthoses to share common problems and approaches between these fields.
Abstract. Physical assistive devices such as mobility aids, exoskeletons or orthoses form an important field of robotics and have received a growing attention over the past years. The design and control of such systems is a challenging task since physical assistive devices stay in close contact with humans and have to adapt their behavior to the current user state and user needs. This requires fundamental understanding of human motor control and coordination mechanisms under normal and pathological conditions as well as online observation and identification of the current user state and intention to reliably adjust the assistive device behavior and to provide appropriate support. Model-based simulation and optimization can be very powerful tools in this context and will be the main topic of this workshop. We will focus on computational tools and the underlying mathematical methods as well as modeling approaches with the main aim of giving an overview of the state of the art in this field and of highlighting future directions. The workshop particularly aims at joining experts for different physical assistive devices, i.e. mobility aids, exoskeletons and orthoses to share common problems and approaches between these fields.
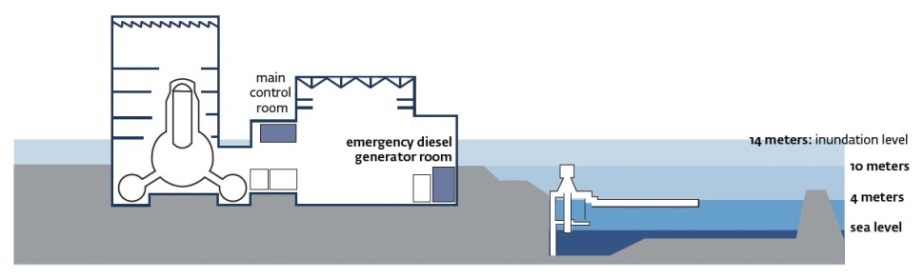 Abstract. This is the first workshop formally organized by RAS Technical Committee on Robotics and Automation in Nuclear Facilities. The objectives of this workshop is to bring together the experts who work on the decommissioning of nuclear facilities at TEPCO Fukushima Daiichi Nuclear Power Plant, and the researchers, engineers, and graduate students who study in the relevant fields in robotics and intelligent systems, share the update of decommission and discuss on technology developments, cooperation in international community, social ICT for emergency advising, co-developments, and archiving. Decommissioning of TEPCO Fukushima Daiichi Nuclear Power Plant is reported to take three or four decades. In order to decommission the facility and process the nuclear fuel, debris, and contaminant by minimizing the human exposure to the radioactive environments, the mid-to-long-term research and development are asked to the community of robotics and automation technology. Not only for the decommissioning, it is also asked whether the technology of our age can make the nuclear power safe and affordable energy source for the human society. The readiness of robotics and automation technology would be an indispensable condition when the question is answered in a positive way.
Abstract. This is the first workshop formally organized by RAS Technical Committee on Robotics and Automation in Nuclear Facilities. The objectives of this workshop is to bring together the experts who work on the decommissioning of nuclear facilities at TEPCO Fukushima Daiichi Nuclear Power Plant, and the researchers, engineers, and graduate students who study in the relevant fields in robotics and intelligent systems, share the update of decommission and discuss on technology developments, cooperation in international community, social ICT for emergency advising, co-developments, and archiving. Decommissioning of TEPCO Fukushima Daiichi Nuclear Power Plant is reported to take three or four decades. In order to decommission the facility and process the nuclear fuel, debris, and contaminant by minimizing the human exposure to the radioactive environments, the mid-to-long-term research and development are asked to the community of robotics and automation technology. Not only for the decommissioning, it is also asked whether the technology of our age can make the nuclear power safe and affordable energy source for the human society. The readiness of robotics and automation technology would be an indispensable condition when the question is answered in a positive way.










 Abstract. There has been a strong trend towards using semantic information in robotics: Perception and mapping systems extract semantic information about types and properties of objects and relations between them, and more and more robots use semantic knowledge for planning their tasks and interacting with humans. Especially when interacting with objects, robots need much knowledge about the properties of these objects, actions they can be used for, and the environments they are working in order to competently take decisions and to appropriately handle the objects. We thus believe that semantics and AI methods will become a more and more important topic in robotics. While the AAAI Spring Symposia on ``Designing Intelligent Robots: Re-integrating AI'' provided a venue for AI researchers interested in robotics, we would like to build the complementary community of robotics researchers interested in AI, and to foster collaboration between the two.
Abstract. There has been a strong trend towards using semantic information in robotics: Perception and mapping systems extract semantic information about types and properties of objects and relations between them, and more and more robots use semantic knowledge for planning their tasks and interacting with humans. Especially when interacting with objects, robots need much knowledge about the properties of these objects, actions they can be used for, and the environments they are working in order to competently take decisions and to appropriately handle the objects. We thus believe that semantics and AI methods will become a more and more important topic in robotics. While the AAAI Spring Symposia on ``Designing Intelligent Robots: Re-integrating AI'' provided a venue for AI researchers interested in robotics, we would like to build the complementary community of robotics researchers interested in AI, and to foster collaboration between the two.

 Abstract. Current advances in medical robotics have enabled the performance of complex procedures through the development of surgical platforms with enhanced dexterity. However, the complexity of these systems increases the cognitive burden on the operator. For seamlessly interfacing the robot with the human, is therefore fundamental to improve the ergonomics and reduce the control dimensionality by automating the performance of simple tasks and integrating intelligent features in novel surgical robots. The robot must be able to sense changes in the dynamic surgical environment and adapt its actions accordingly, always keeping the human in the control loop. This is critical for overcoming the potential legal and ethical issues and promoting the wider uptake of robotic surgery. The aim of this workshop is to bring together researchers from relevant disciplines to discuss novel techniques for cognitive surgical robotics and to establish its role in promoting the effective and safe integration of robotic technology in surgery.
Abstract. Current advances in medical robotics have enabled the performance of complex procedures through the development of surgical platforms with enhanced dexterity. However, the complexity of these systems increases the cognitive burden on the operator. For seamlessly interfacing the robot with the human, is therefore fundamental to improve the ergonomics and reduce the control dimensionality by automating the performance of simple tasks and integrating intelligent features in novel surgical robots. The robot must be able to sense changes in the dynamic surgical environment and adapt its actions accordingly, always keeping the human in the control loop. This is critical for overcoming the potential legal and ethical issues and promoting the wider uptake of robotic surgery. The aim of this workshop is to bring together researchers from relevant disciplines to discuss novel techniques for cognitive surgical robotics and to establish its role in promoting the effective and safe integration of robotic technology in surgery.
 Abstract. Assistive Robotics covers currently a broad spectrum of research axis, from intelligent robots acting as a servant, secretary, or companion to intelligent robotic functions such as autonomous wheelchair navigation, embedded robotics, ambient intelligence, or intelligent spaces. The proposed workshop focuses on Robotics for people assistance with a particular focus on frail people. This major research issue will affect our lives in the near future. The purpose of this workshop is to gather researchers from various fields to discuss topics related to the challenging problems of assisting people in their everyday life. Topics related to social interaction, intelligent habitat, mobility assistance, healthcare and wellbeing will be covered. Fundamental and technological research particularly related to autonomous indoor vehicles, sensor and actuators networks, wearable and ubiquitous technologies, and human robot interaction, will be presented. The objective of the workshop is to provide a review and challenges of the relevant applications in Assistance and Service Robotics in a Human Environment.
Abstract. Assistive Robotics covers currently a broad spectrum of research axis, from intelligent robots acting as a servant, secretary, or companion to intelligent robotic functions such as autonomous wheelchair navigation, embedded robotics, ambient intelligence, or intelligent spaces. The proposed workshop focuses on Robotics for people assistance with a particular focus on frail people. This major research issue will affect our lives in the near future. The purpose of this workshop is to gather researchers from various fields to discuss topics related to the challenging problems of assisting people in their everyday life. Topics related to social interaction, intelligent habitat, mobility assistance, healthcare and wellbeing will be covered. Fundamental and technological research particularly related to autonomous indoor vehicles, sensor and actuators networks, wearable and ubiquitous technologies, and human robot interaction, will be presented. The objective of the workshop is to provide a review and challenges of the relevant applications in Assistance and Service Robotics in a Human Environment.
 Abstract. Optimization or optimal control offers an interesting way to generate motions automatically based on elementary principles described by cost functions and constraints. The objective of this workshop is to gather researchers from humanoid robotics and optimization, and also from related research areas, in order to discuss latest algorithmic developments in offline and online optimization for humanoid robotics as well as current applications and future challenging application areas still waiting for appropriate methods.
Abstract. Optimization or optimal control offers an interesting way to generate motions automatically based on elementary principles described by cost functions and constraints. The objective of this workshop is to gather researchers from humanoid robotics and optimization, and also from related research areas, in order to discuss latest algorithmic developments in offline and online optimization for humanoid robotics as well as current applications and future challenging application areas still waiting for appropriate methods.