Local-to-Global Signature Descriptor For 3D Object Recognition
by Isma Hadji
Introduction
As was the case in the early years of 2D object recognition,
among the different processing steps involved in 3D object
recognition, the design of feature vectors, or descriptors, is
still a most critical one for it has the greatest effect on the
over-all recognition result.
The techniques adopted for object description can be divided
into two main categories; global or local. While local
descriptors proved to be a more attractive choice for object
recognition within cluttered scenes, they remain less
discriminating exactly due to the limited scope of the local
neighborhood. On the other hand, global descriptors can better
capture relationships between distant points, but are generally
affected by occlusions and clutter.
In our research we propose the Local-to-Global Signature (LGS)
descriptor that falls at the junction between the two paradigms.
The LGS captures the global structure of objects while remaining
robust to clutter and occlusion using signature-like features.
Also, the proposed approach can capture more robustly the exact
structure of the objects while abstracting from sensitive,
low-level features, such as point normals or curvatures.
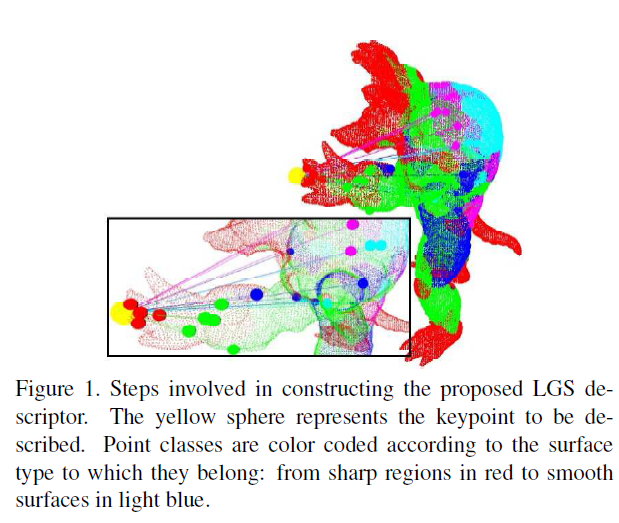
Figure 1 illustrates the different steps involved in
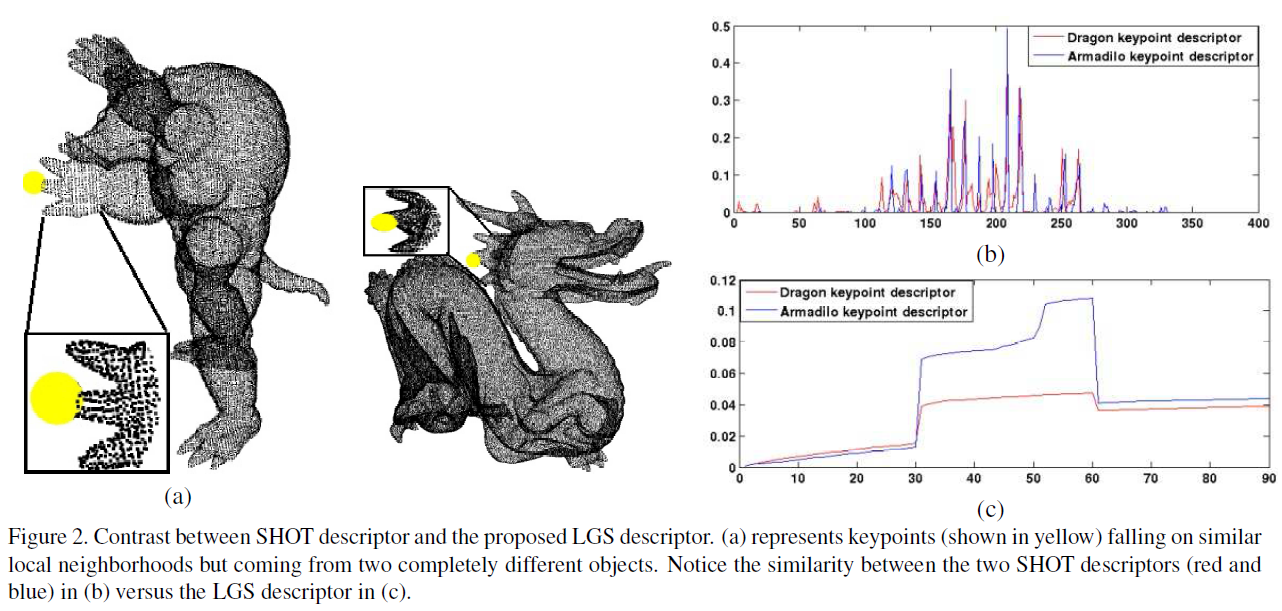
constructing our descriptor, while Figure 2 highlights the
advantages brought by our method as opposed to traditional local
descriptors.
For details on the implementation of the proposed LGS
descriptor, the experiments and results we refer the reader to
our paper in [1].
References
-
I. Hadji and G. N. DeSouza, "Local-to-Global Signature Descriptor For 3D Object Recognition ". In Proceedings of the RoLod workshop held in conjunction with the Asian Conference on Computer Vision (ACCV), 2014