#include <ArDocking.h>
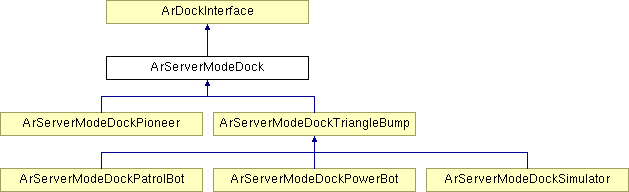
Inheritance diagram for ArServerModeDock:
You need to have a dock object in your map. Some conditions for automatically docking, and for staying docked or allowing the robot to leave the dock, can be set via ArConfig (or directly).
Public Member Functions | |
| ArServerModeDock (ArServerBase *serverBase, ArRobot *robot, ArLocalizationTask *locTask, ArPathPlanningTask *pathTask, bool useChargeState=false, ArFunctor *shutdownFunctor=NULL) | |
| Constructor. | |
| virtual | ~ArServerModeDock (void) |
| Destructor. | |
| virtual State | getState (void) const |
| Gets the docking state we're in. | |
| virtual void | dock (void)=0 |
| Sends the robot to the dock (subclass needs to implement). | |
| virtual void | undock (void)=0 |
| Has the robot leave the dock (subclass needs to implement). | |
| virtual void | checkDock (void) |
| Sees if the robot is already docked and activates itself if it is (subclass should implement). | |
| virtual void | activateAsDocked (void) |
| Forces the robot to think that it is already docked and to activate it. | |
| virtual void | checkDefault (void) |
| For default modes, sees if it should activate itself. | |
| virtual bool | getForcedDock (void) |
| Gets whether our docking is forced or not. | |
| void | requestForcedDock (void) |
| Requests a forced dock. | |
| const char * | getDockName (void) |
| Gets the name of the dock we're using. | |
| void | setDockingVoltage (double dockingVoltage) |
| Set the voltage we go dock at. | |
| double | getDockingVoltage (void) const |
| Get the voltage we go dock at. | |
| void | setDoneChargingVoltage (double doneChargingVoltage) |
| Set the voltage we're done docking at (does first of voltage or time). | |
| double | getDoneChargingVoltage (void) const |
| Get the voltage we're done docking at (does first of voltage or time). | |
| void | setDoneChargingMinutes (int doneChargingMinutes) |
| Sets the number of minutes we dock for (does first of voltage or time). | |
| int | getDoneChargingMinutes (void) |
| Gets the number of minutes we dock for (does first of voltage or time). | |
| bool | getUseChargeState () |
| Gets whether we're using the charge state or not. | |
| void | setDoneChargingAtFloat (bool doneChargingAtFloat) |
| Sets whether we're done docking at float or not (this ONLY has meaning if getUseChargeState is true). | |
| bool | getDoneChargingAtFloat (void) |
| Gets whether we're done docking at float or not (this ONLY has meaning if getUseChargeState is true). | |
| void | setMinimumMinutesBetweenAutoDock (int minutesBetween) |
| Sets the number of minutes we won't auto redock for this many minutes after the last dock. | |
| int | getMinimumMinutesBetweenAutoDock (void) |
| Sets the number of minutes we won't auto redock for this many minutes after the last dock. | |
| void | setAutoDock (bool autoDocking) |
| Sets whether we auto dock or not. | |
| bool | getAutoDock (void) |
| Enables the auto docking. | |
| virtual void | addToConfig (ArConfig *config) |
| Adds the docking information to the given config. | |
| virtual void | addControlCommands (ArServerHandlerCommands *handlerCommands) |
| Adds simple commands to. | |
| void | serverDock (ArServerClient *client, ArNetPacket *packet) |
| Takes the server command to undock. | |
| void | serverUndock (ArServerClient *client, ArNetPacket *packet) |
| Takes the server command to undock. | |
| void | serverDockInfo (ArServerClient *client, ArNetPacket *packet) |
| Returns out the state of the docking. | |
| void | serverGetAutoDock (ArServerClient *client, ArNetPacket *packet) |
| Returns whether we're auto docking or not. | |
| void | serverSetAutoDock (ArServerClient *client, ArNetPacket *packet) |
| Sets whether we're auto docking or not. | |
| void | addStateChangedCB (ArFunctor *functor, ArListPos::Pos position=ArListPos::LAST) |
| Adds a functor to get called when the state changes. | |
| void | remStateChangedCB (ArFunctor *functor) |
| Removes a functor to get called when the state changes. | |
| unsigned int | getFailedGotoNum (void) |
| Gets the number of times goto has failed. | |
| void | addForcedDockCB (ArFunctor *functor, int position=50) |
| Adds a callback for when forced docking (mostly voltage) occurs. | |
| void | remForcedDockCB (ArFunctor *functor) |
| Removes a callback for when forced docking (mostly voltage) occurs. | |
| void | addIdleDockCB (ArFunctor *functor, int position=50) |
| Adds a callback for when idle docking occurs. | |
| void | remIdleDockCB (ArFunctor *functor) |
| Removes a callback for when idle docking occurs. | |
| void | addRequestedDockCB (ArFunctor *functor, int position=50) |
| Adds a callback for when normal requested docking occurs. | |
| void | remRequestedDockCB (ArFunctor *functor) |
| Removes a callback for when normal requested docking occurs. | |
| void | addDrivingToDockCB (ArFunctor *functor, int position=50) |
| Adds a callback for when the robot is driving to the docking goal. | |
| void | remDrivingToDockCB (ArFunctor *functor) |
| Removes a callback for when the robot is driving to the docking goal. | |
| void | addDrivingIntoDockCB (ArFunctor *functor, int position=50) |
| Adds a callback for when the robot is driving into the actual dock. | |
| void | remDrivingIntoDockCB (ArFunctor *functor) |
| Removes a callback for when the robot is driving into the actual dock. | |
| void | addDockedCB (ArFunctor *functor, int position=50) |
| Adds a callback for when the robot is finally docked. | |
| void | remDockedCB (ArFunctor *functor) |
| Removes a callback for when the robot is finally docked. | |
| void | addDockNowUnforcedCB (ArFunctor *functor, int position=50) |
| Adds a callback for when the robot is not forced docked anymore. | |
| void | remDockNowUnforcedCB (ArFunctor *functor) |
| Removes a callback for when the robot is not forced anymore. | |
| void | addDockNowForcedCB (ArFunctor *functor, int position=50) |
| Adds a callback for when the robot is forced again. | |
| void | remDockNowForcedCB (ArFunctor *functor) |
| Removes a callback for when the robot is forced again. | |
| void | addUndockingCB (ArFunctor *functor, int position=50) |
| Adds a callback for when the robot is undocking. | |
| void | remUndockingCB (ArFunctor *functor) |
| Removes a callback for when the robot is undocking. | |
| void | addUndockedCB (ArFunctor *functor, int position=50) |
| Adds a callback for when the robot is undocked. | |
| void | remUndockedCB (ArFunctor *functor) |
| Removes a callback for when the robot is undocked. | |
Static Public Member Functions | |
| static ArServerModeDock * | createDock (ArServerBase *serverBase, ArRobot *robot, ArLocalizationTask *locTask, ArPathPlanningTask *pathTask, ArFunctor *shutdownFunctor=NULL) |
| This will create a dock of the appropriate type for the robot. | |
Protected Member Functions | |
| void | dockUserTask (void) |
| ArMapObject * | findDock (ArMapInterface *arMap) |
| this is a helper function that will find the dock from the preferred dock and whats in the map | |
| void | clearInterrupted (void) |
| This is for clearing the interrupted mode. | |
| void | resumeInterrupted (bool assureDeactivation) |
| This is for resuming the interrupted mode if we should. | |
| void ArServerModeDock::dockUserTask | ( | void | ) | [protected] |
 1.5.1
1.5.1