Affine Transformation for 3D Motion Estimation with Octree Structure.
General Steps:
Chicken Sequence, Frame 100-120, ErrorThreshold = 0.1
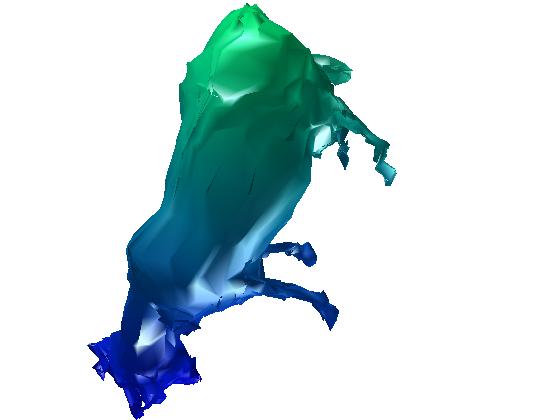
Dance Sequence, Frame 1-25, ErrorThreshold = 0.1
1. In each frame, a bounding box is set.
The size of the bounding box is set to be able to enclose all the
vertexes ![]() in
the previous frame. (In the beginning, the previous frame and current
frame are chosen as the 1st and 2nd frames)
in
the previous frame. (In the beginning, the previous frame and current
frame are chosen as the 1st and 2nd frames)
2. All the positions of vertexes in the
current frame (![]() )
and previous frame (
)
and previous frame (![]() )
are normalized by the size of the bounding box of the previous frame.
(Some of the vertex in the current frame may reside out of the bounding
box for previous frame, but this does not make any difference, since the
bounding box is just used to normalize the vertex to make sure the value
of transformation H remain in the certain range, and the difference
between two successive frames is far smaller than the ill-value
generated by the singular condition of
)
are normalized by the size of the bounding box of the previous frame.
(Some of the vertex in the current frame may reside out of the bounding
box for previous frame, but this does not make any difference, since the
bounding box is just used to normalize the vertex to make sure the value
of transformation H remain in the certain range, and the difference
between two successive frames is far smaller than the ill-value
generated by the singular condition of![]() .
This will be discussed in the following sections)
.
This will be discussed in the following sections)
3. Apply equation (2) for the vertexes in previous frame and the corresponding vertexes in the current frame to get the homogeneous transformation matrix H.
4. Apply quantization for homogeneous matrix H, save the quantization result, and dequantize the result to find the dequantized homogeneous matrix H’
5. If the error produced by
![]() is
larger than a certain threshold T. The cube will be divided into 8
smaller cube.
is
larger than a certain threshold T. The cube will be divided into 8
smaller cube.
6. Calculate the vertexes enclosed by each child cube to get a subset of vertexes.
7. For each of the sub cube, go to step 3 on these new vertexes, until the error is no larger than T.
8. If the error from
![]() is
smaller than T, save
is
smaller than T, save![]() as
the rebuilt frame and return.
as
the rebuilt frame and return.
9. Use the rebuilt
frame as the previous frame![]() ,
loop for all the frames. If the number of vertexes in the new sub cude
is less than or equal to 4, then save the position of these 4 vertexes
instead of calculating the transformation matrix H. (Since the size of a
homogeneous transformation matrix is 3 by 4, so it is no more efficient
than to just save the positions of 4 vertexes, which is also 3 by 4)
,
loop for all the frames. If the number of vertexes in the new sub cude
is less than or equal to 4, then save the position of these 4 vertexes
instead of calculating the transformation matrix H. (Since the size of a
homogeneous transformation matrix is 3 by 4, so it is no more efficient
than to just save the positions of 4 vertexes, which is also 3 by 4)
Current Results: