#include <ArDockInterface.h>
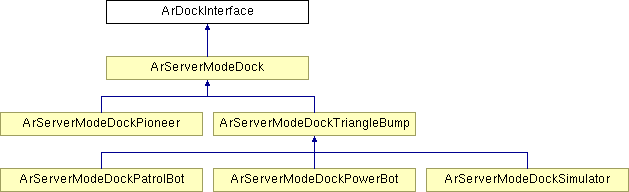
Inheritance diagram for ArDockInterface:
For a local robot, these methods are implemented by ArServerModeDock. With the central server and remote robots, these methods are implemented by AramCentralDockProxy.
Public Member Functions | |
| ArDockInterface () | |
| Constructor. | |
| virtual | ~ArDockInterface () |
| Destructor. | |
| virtual State | getState () const=0 |
| Gets the docking state we're in. | |
| virtual bool | getForcedDock ()=0 |
| Gets whether our docking is forced or not. | |
 1.5.1
1.5.1